
近日,太阳集团app首页太阳集团1088vip王吉壯/李丹教授團隊在前期光驅動矽納米線馬達研究的基礎上,進一步開發了基于金屬-絕緣體-半導體(MIS)結構的光磁複合矽基微馬達。通過能帶結構優化将磁性金屬Ni引入MIS結構的一體化構造,在保證優異光電化學性能的基礎上,增強了方向的操控性。此外,磁性元素的引入也為合理化磁組裝提供了條件。以光驅動矽基馬達作為基礎組件,研究團隊創新性的開發了微洞陣列模闆輔助的磁組裝策略實現了多種結構的矽基微機器人的合理化組裝構建,并展示出增強的細胞操控性能。相關工作以“Template-Guided Silicon Micromotor Assembly for Enhanced Cell Manipulation”為題發表在國際權威期刊Angew. Chem. Int. Ed.(https://doi.org/10.1002/anie.202405895)。

圖1. 論文在線發表截圖
微納機器人作為一種微觀尺度上具有特定功能的新型微納米器件,其研究及應用取得了顯著進展。然而,随着應用研究的深入,對其操控性和功能性提出了更高的要求,這也激發了領域研究者不斷嘗試新的方法,以滿足應用需求構建功能微納機器人。其中,通過整合不同的功能組件并開發合理的組裝策略被證明是一種有效的方法來構建微納機器人。

圖2. 基于MIS結矽納米線光磁複合馬達的構建、模闆輔助合理化組裝微機器人(OHMs)及細胞操控示意圖。
本工作中,作者提出了一種基于金屬-絕緣體-半導體(MIS)結構的矽納米線光磁複合微馬達(OHM),通過MIS結構的優化設計,合理化選擇磁性金屬Ni作為金屬端,同時也可作為磁控組分,為OHM的精确磁操控和組裝提供了可能(圖2)。在可見光的照射下,OHM利用光激發的光電化學反應誘導的自電泳進行有效推進和實時的啟停控制(圖3)。

圖3. 矽納米線馬達光驅動機理模拟、實時啟停控制及光強度響應運動性能。
正如在宏觀機器構造一樣,設計功能強大的微納機器人也需要可控組裝作為一種高效策略。研究團隊利用所開發的MIS結複合馬達的磁性特征,創新性的提出了一種微洞陣列模闆輔助組裝(HAA)的方法,如圖4所示,首先将一個馬達引導進入洞中固定,然後操控另一個馬達與其組裝,重複該過程即可實現不同結構微機器人的構建。除了組裝,通過微洞還可實現解組裝的操作。孔輔助組裝為微納機器人的構建提供了一種簡單可行的策略。
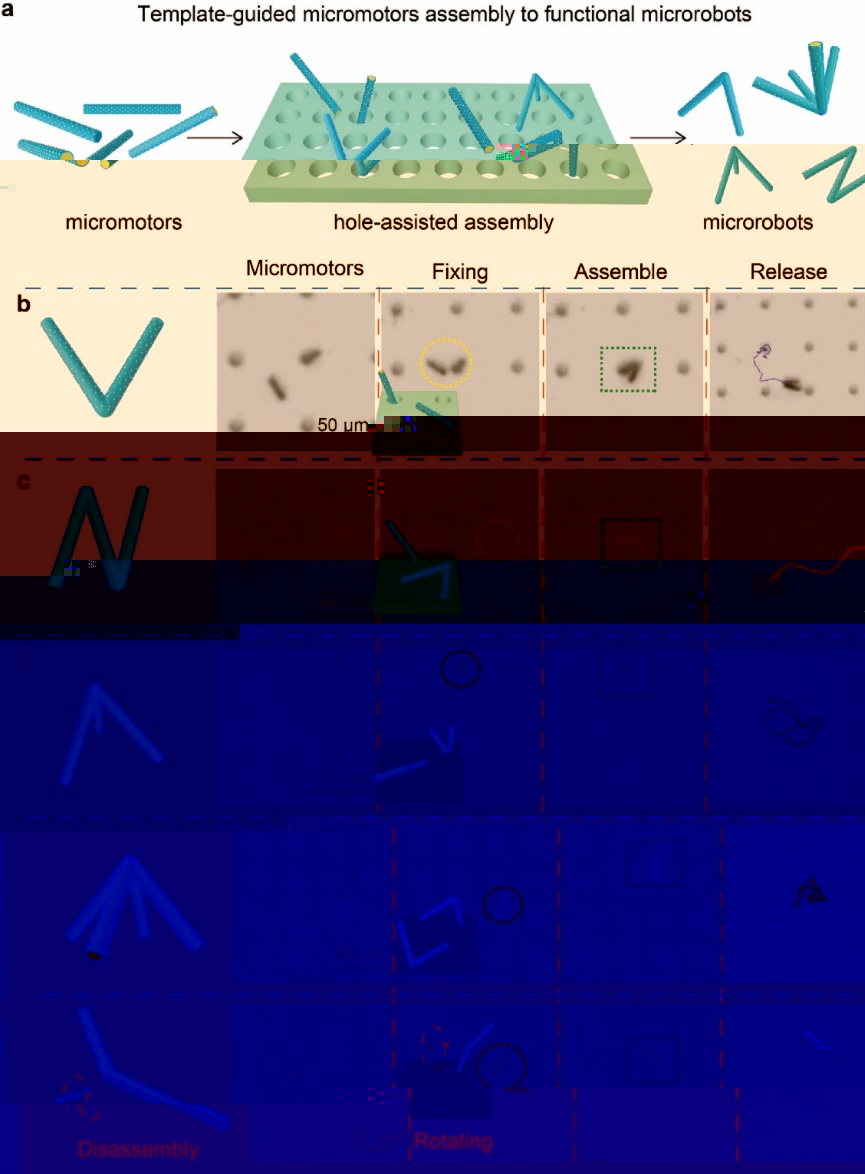
圖4. 通過微洞陣列模闆輔助組裝的方法實現OHM的合理化組裝與拆解。
與單個微納馬達相比,組裝的微機器人表現出增強的操控能力。如圖5a, b所示,“V”字型微機器人具有運輸多個細胞的能力。此外,還可通過磁控的旋轉實現細胞的挖掘操作(圖5c, d)。空間的三叉結構馬達表現出更穩定的細胞抓取能力,如圖5e所示,利用三叉微機器人可以實現細胞的精确操控,構建獨特的JNU形狀。

圖5. 微型機器人對細胞的操控。
綜上所述,研究團隊展示了一種基于MIS結構的矽基光磁複合微馬達。在可見光激發下,通過光電化學反應觸發的自電泳實現自驅動。利用該微馬達的磁性特征,通過簡單的洞陣列模闆輔助實現了微馬達組裝以構建多種結構的微機器人。這些組裝的微機器人展示了增強的細胞操控能力,包括多細胞運輸、深洞挖掘和精準定位。該工作所提出的馬達作為基礎組件合理化組裝以及模闆輔助的組裝方法對功能微機器人構建及應用發展具有一定的借鑒意義。
該研究成果的共同第一作者為太阳集团app首页化材院研究生高宇昕和歐樂妍,通訊作者為王吉壯副教授和李丹教授,太阳集团app首页為唯一通訊單位,香港大學唐晉堯教授課題組也參與研究。研究工作得到了國家自然科學基金、國家自然科學基金重點項目、廣東省重大基礎與應用基礎計劃、廣東省重點領域研發計劃、廣州市科技計劃項目和太阳集团app首页等項目大力支持。
原文鍊接:https://doi.org/10.1002/anie.202405895
文圖:高宇昕 歐樂妍
校對:劉 雪
責編:李逸凡
初審:王吉壯
終審:陳填烽
